728x90


스테핑모터 드라이버
http://www.newtc.co.kr/dpshop/shop/item.php?it_id=1314666709
뉴티씨
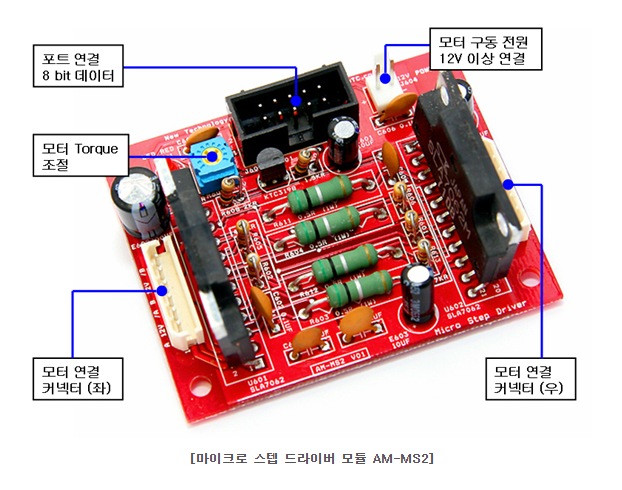
※기본적으로 AM-MS2는 1.5A까지 사용이 가능한 3W 1R이 장착되어 나갑니다. 3A를 사용하고 싶으신 분들은, 구매 시 요청사항에 3A사용하도록 0.5R 장착을 요청하시면 변경해드립니다. ㆍ 마이크로
www.newtc.co.kr
STM32CubeMX
모터 설정 디자인합니다.

프로그래밍
스테핑 모터를 제어하는 드라이버
#define SM_STEP_CLK 8 // Half : 8, Quarter : 16, Eighth : 32, Sixteenth : 64
#define SM_DEGREE SM_STEP_CLK/1.8
#define SM_DEGREE_90 90*SM_STEP_CLK/1.8
#define SM_MODE_SIXTEENTH 0x00
#define SM_MODE_EIGHTH 0x02
#define SM_MODE_QUARTER 0x01
#define SM_MODE_HALF 0x03
#define SM_DIR_LEFT 0x00
#define SM_DIR_RIGHT 0x01
void SM_Enable(void) // Step Motor Enable
{
HAL_GPIO_WritePin(STEP_ENABLE_GPIO_Port, STEP_ENABLE_Pin, GPIO_PIN_SET);
}
void SM_Disable(void) // Step Motor Disable
{
HAL_GPIO_WritePin(STEP_ENABLE_GPIO_Port, STEP_ENABLE_Pin, GPIO_PIN_RESET);
}
void SM_SetMode(uint8_t mMode) // Step Motor Set Mode
{
if(mMode & 0x01)
HAL_GPIO_WritePin(STEP_M0_GPIO_Port, STEP_M0_Pin, GPIO_PIN_SET);
else
HAL_GPIO_WritePin(STEP_M0_GPIO_Port, STEP_M0_Pin, GPIO_PIN_RESET);
if(mMode & 0x02)
HAL_GPIO_WritePin(STEP_M1_GPIO_Port, STEP_M1_Pin, GPIO_PIN_SET);
else
HAL_GPIO_WritePin(STEP_M1_GPIO_Port, STEP_M1_Pin, GPIO_PIN_RESET);
}
void SM_SetDirect(uint8_t mDir)
{
HAL_GPIO_WritePin(STEP_DIR_GPIO_Port, STEP_DIR_Pin, (GPIO_PinState)mDir);
}
void SM_ClockToggle(void)
{
HAL_GPIO_TogglePin(STEP_CLK_GPIO_Port, STEP_CLK_Pin);
}
void SM_LEFT(void)
{
mSM_Count = mAirSetting.StepDegree*SM_DEGREE;
SM_SetDirect(SM_DIR_LEFT);
SM_Enable();
}
void SM_RIGHT(void)
{
mSM_Count = mAirSetting.StepDegree*SM_DEGREE;
SM_SetDirect(SM_DIR_RIGHT);
SM_Enable();
}
void SM_Init(void)
{
SM_SetMode(SM_MODE_QUARTER);
SM_SetDirect(SM_DIR_RIGHT);
}타이머를 이용하여 스테핑모터를 제어합니다.
#if 1
uint8_t mSec=0, mMinute=0, mHour=0;
unsigned short mMS = 0, mCurrMS = 0, mCurr10MS = 0, mCurr100MS = 0, mCurr500MS = 0;
unsigned int mCurrentSec = 0, mTimerSec = 0;
unsigned char mCurrSec = 0;
unsigned char mMainMode = 0;
void HAL_SYSTICK_Callback(void)
{
mMS++;
if(mMS >= 1000)
{
mCurrentSec++;
mSec++;
if(mSec >= 60)
{
mMinute++;
if(mMinute >= 60)
{
mHour++;
mMinute = 0;
}
mSec = 0;
}
mMS = 0;
}
}
#endif
void Main_1ms_Timer(void) // Fast
{
if(mPowerOn)
{
}
if(mSM_Count == 0)
{
SM_Disable();
}
else
{
mSM_Count--;
HAL_GPIO_TogglePin(STEP_CLK_GPIO_Port, STEP_CLK_Pin);
}
}
void Main_10ms_Timer(void)
{
}
void Main_100ms_Timer(void)
{
}
void Main_500ms_Timer(void)
{
if(mPowerOn)
{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET);
}
else
{
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
}
}
void Main_1S_Timer(void)
{
if(mPowerOn)
{
}
}
// Timer Functions
void (*f10msTimer_FuncList[MODE_MAX])(void) =
{
Main_10ms_Timer,
};
void (*f100msTimer_FuncList[MODE_MAX])(void) =
{
Main_100ms_Timer,
};
void (*f500msTimer_FuncList[MODE_MAX])(void) =
{
Main_500ms_Timer,
};
void (*f1sTimer_FuncList[MODE_MAX])(void) =
{
Main_1S_Timer,
};
void Process_1ms(void)
{
Main_1ms_Timer();
}
void Process_10ms(void)
{
if(f10msTimer_FuncList[mMainMode] != NULL)
f10msTimer_FuncList[mMainMode]();
}
void Process_100ms(void)
{
if(f100msTimer_FuncList[mMainMode] != NULL)
f100msTimer_FuncList[mMainMode]();
}
void Process_500ms(void)
{
if(f500msTimer_FuncList[mMainMode] != NULL)
f500msTimer_FuncList[mMainMode]();
}
void Process_1sec(void)
{
if(f1sTimer_FuncList[mMainMode] != NULL)
f1sTimer_FuncList[mMainMode]();
}
void Timer_Process(void)
{
if(mMS != mCurrMS)
{
Process_1ms();
if(mCurr10MS != (mMS/10))
{
mCurr10MS = mMS/10;
Process_10ms();
}
if(mCurr100MS != (mMS/100))
{
mCurr100MS = mMS/100;
Process_100ms();
}
if(mCurr500MS != (mMS/500))
{
mCurr500MS = mMS/500;
Process_500ms();
}
if(mCurrSec != mSec)
{
mCurrSec = mSec;
Process_1sec();
}
mCurrMS = mMS;
}
}
main 루프 : 조이스틱키를 입력 수신하여 스테핑모터를 제어합니다.
uint32_t startTime = 0;
uint32_t elapsedTime = 0;
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
elapsedTime = HAL_GetTick();
if(800 < (elapsedTime - startTime)) {
keyKinds = KEY_UNDEFINED;
keyKindsOld = KEY_UNDEFINED;
}
#if 1
if(HAL_GPIO_ReadPin(KEY_CTRL_GPIO_Port, KEY_CTRL_Pin) == GPIO_PIN_SET){
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET);
}else{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_RESET);
keyKinds = KEY_ENTER;
}
if(HAL_GPIO_ReadPin(KEY_RIGHT_GPIO_Port, KEY_RIGHT_Pin) == GPIO_PIN_SET){
}else{
keyKinds = KEY_RIGHT;
}
if(HAL_GPIO_ReadPin(KEY_LEFT_GPIO_Port, KEY_LEFT_Pin) == GPIO_PIN_SET){
}else{
keyKinds = KEY_LEFT;
}
if(HAL_GPIO_ReadPin(KEY_UP_GPIO_Port, KEY_UP_Pin) == GPIO_PIN_SET){
}else{
//printf("push KEY_UP\r\n");
keyKinds = KEY_UP;
}
if(HAL_GPIO_ReadPin(KEY_DOWN_GPIO_Port, KEY_DOWN_Pin) == GPIO_PIN_SET){
}else{
keyKinds = KEY_DOWN;
}
if(HAL_GPIO_ReadPin(KEY_WAKEUP_GPIO_Port, KEY_WAKEUP_Pin) == GPIO_PIN_SET){
//printf("push KEY_WAKEUP\r\n");
keyKinds = KEY_WAKEUP;
}else{
}
if(keyKinds == KEY_UNDEFINED || keyKinds != keyKindsOld)
{
switch(keyKinds)
{
case KEY_UNDEFINED: break;
case KEY_ENTER: printf("JOY_KEY_ENTER # \r\n"); break;
case KEY_LEFT:
printf("JOY_KEY_LEFT # \r\n");
mAirSetting.StepDegree = 45;
SM_LEFT();
break;
case KEY_RIGHT:
printf("JOY_KEY_RIGHT # \r\n");
mAirSetting.StepDegree = 45;
SM_RIGHT();
break;
case KEY_UP:
printf("JOY_KEY_UP # \r\n");
mAirSetting.StepDegree = 90;
SM_LEFT();
break;
case KEY_DOWN:
printf("JOY_KEY_DOWN # \r\n");
mAirSetting.StepDegree = 90;
SM_RIGHT();
break;
case KEY_WAKEUP: printf("JOY_KEY_WAKEUP # \r\n"); break;
}
if(keyKinds != KEY_UNDEFINED)
{
keyKindsOld = keyKinds;
startTime = elapsedTime;
}
}
Timer_Process();
#endif
}테스트영상

'임베디드 보드 > STM32' 카테고리의 다른 글
| 버튼을 이용하여 LED 밝기 제어 degined by STemWin (0) | 2020.07.21 |
|---|---|
| STemWin (0) | 2020.07.20 |
| STM32H7 JOYSTICK KEY 테스트 (0) | 2020.07.18 |
| STM32H7 OpenH743I UART 설정 on STM32CubeMX (0) | 2020.07.18 |
| STM32H7 모터제어 by Node-RED (0) | 2020.07.17 |



