


1cm의 해상도로 측정 범위가 최대 8m 인 ToF (Time of Flight) 거리 센서 기반의 싱글 포인트 LIDAR. 고유 한 광학 구조 덕분에 안정적이고 정확하며 매우 민감한 측정을 수행 할 수 있습니다. 최대 거리 8m에서의 측정 오류는 2.5cm에 불과합니다. 이 센서는 크기가 작고 무게가 작습니다. 소형 차량의 장애물 감지 센서 또는 비행 물체의지면 충격으로부터 보호하기에 적합합니다.
데이터시트
May-DFRobot/DFRobot
www.dfrobot.com. Contribute to May-DFRobot/DFRobot development by creating an account on GitHub.
github.com
메뉴얼
May-DFRobot/DFRobot
www.dfrobot.com. Contribute to May-DFRobot/DFRobot development by creating an account on GitHub.
github.com
거리측정 관련 여러가지 센서들이 있습니다. 측정 거리에 맞게 선택하시면 됩니다.

https://www.dfrobot.com/product-1995.html
TF-Luna (ToF) Micro Single-point Ranging LiDAR- DFRobot
You have choosen:[[togetherChouseinfo.num]] Total amount: [[currency]][[togetherChouseinfo.price]] [[togetherChouseinfo.price]][[currency]]
www.dfrobot.com
소스코드
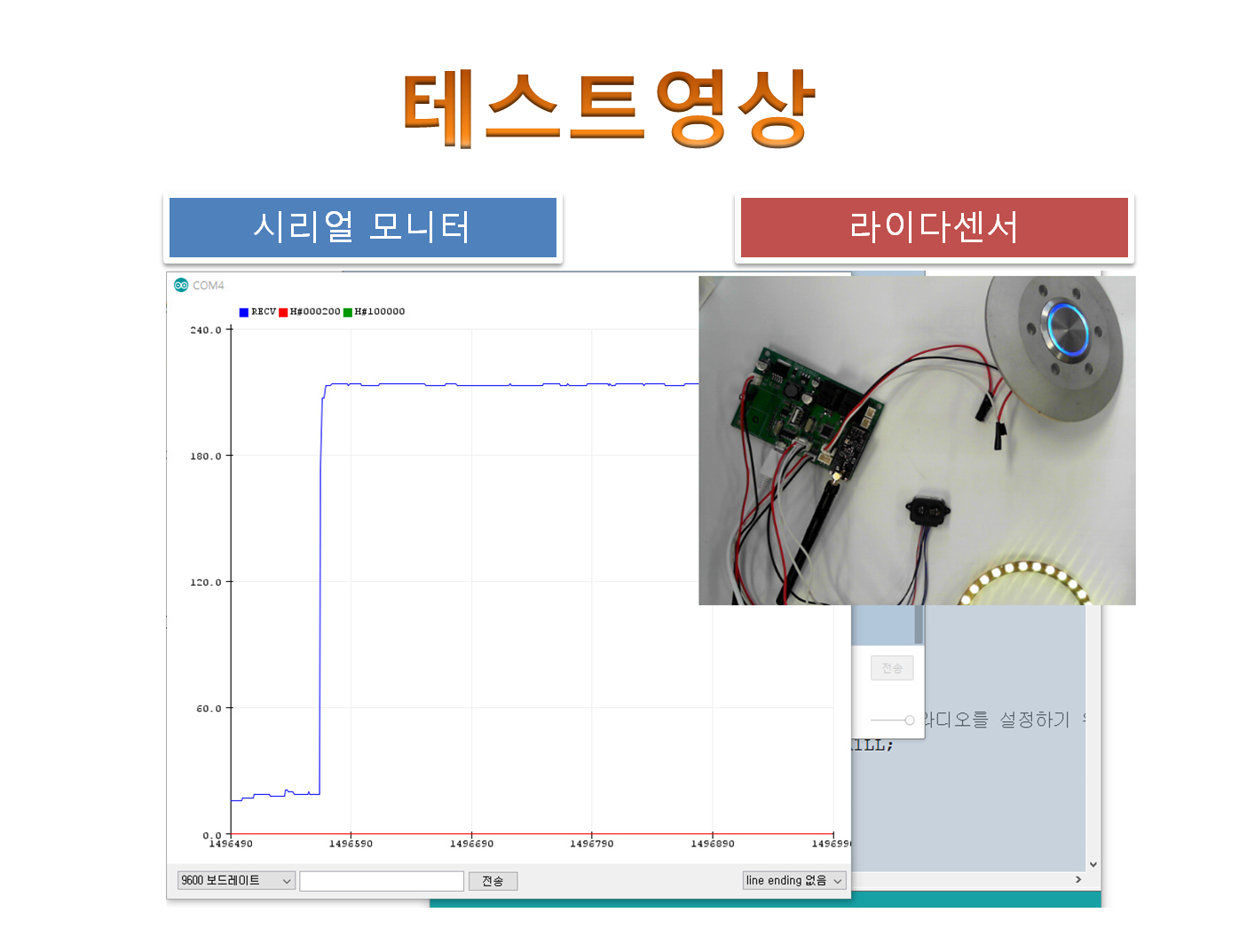
아두이노 시리얼 포트를 이용하여 쉽게 확인이 가능합니다.
/* For Arduinoboards with multiple serial ports like DUEboard, interpret above two pieces of code and
directly use Serial1 serial port*/
int dist;//actual distance measurements of LiDAR
int strength;//signal strength of LiDAR
int check;//save check value
int i;
int uart[9];//save data measured by LiDAR
const int HEADER=0x59;//frame header of data package
void loop_ridar()
{
if (mySerial.available())//check if serial port has data input
{
if(mySerial.read()==HEADER)//assess data package frame header 0x59
{
uart[0]=HEADER;
if(mySerial.read()==HEADER)//assess data package frame header 0x59
{
uart[1]=HEADER;
for(i=2;i<9;i++)//save data in array
{
uart[i]=mySerial.read();
}
check=uart[0]+uart[1]+uart[2]+uart[3]+uart[4]+uart[5]+uart[6]+uart[7];
if(uart[8]==(check&0xff))//verify the received data as per protocol
{
dist=uart[2]+uart[3]*256;//calculate distance value
strength=uart[4]+uart[5]*256;//calculate signal strength value
//Serial.print("dist = ");
//Serial.print(dist);//output measure distance value of LiDAR
//Serial.print('\t');
//Serial.print("strength = ");
//Serial.print(strength);//output signal strength value
// Serial.print('\n');
}
}
}
}
}테스트영상
'임베디드 보드 > 아두이노' 카테고리의 다른 글
| 전압/전류 Data 전송 From Arduino to Node-RED (0) | 2020.08.13 |
|---|---|
| 아두이노 전류량/ 전압 체크 (1) | 2020.08.12 |
| 아두이노 배터리량 체크 (3) | 2020.08.11 |
| 디지털 차압 게이지 - 아두이노 측정 (0) | 2020.07.31 |
| 아두이노 메가 + WIFI모듈 ESP8266 + 팬모터 송풍기 제어 (0) | 2020.07.13 |



